
Dr. Dileep Kumar
Ph.D. in Electrical Engineering
IIT Kanpur, India
Email: dileepk2024@iitkalumni.org
Contact Number: +91 8852974501
Downloads:
1. Resume
2. Ph.D. Defense Presentation
- Control and Systems Engineer with expertise in control system analysis, design, and implementation, and in systems and software engineering of electric vehicles.
- Skilled in Systems Engineering (requirements, architecture, design, integration, and validation), vehicle dynamics, motor control, path-tracking, and energy-efficiency optimization, with strong experience in power electronics, embedded systems, and model-based design (MATLAB/Simulink).
- Proven track record in cross-functional collaboration, delivering robust electric powertrain systems, and driving innovation from research to industry applications.
- Ph.D. in Electrical Engineering (Control & Automation) – IIT Kanpur (2015–2023)
- M.Tech in Electrical Engineering (Control Systems) – NIT Patna (2010–2012)
- B.Tech in Electronics and Communication Engineering – SMVD University, J&K (2006–2010)
Mahindra & Mahindra (12/2023 – Present)
Lead Engineer – Electric Powertrain Software Development and Technical Delivery
- Led collaboration with cross-functional teams (systems and software engineering) to ensure seamless and robust development of electric powertrain software for Mahindra Electric Vehicles.
- Working on (a) strengthening system engineering process development and (b) enhancing the energy efficiency of electric powertrain systems.
NIMS University, Jaipur (08/2012 – 07/2015)
Assistant Professor – Electrical Engineering
- Taught Classical Control, Modern Control, Power Electronics, Embedded Systems, and MATLAB.
- Mentored Students in Research Projects related to Control and Power Electronics Applications.
- Control Systems: PID-tuning, Loop Shaping, Disturbance Rejection, ADRC, DC and BLDC Motor Control.
- Power Electronics: Motor Controller (H-Bridge and Inverter), Power Converters, Solar-MPPT.
- Electric Vehicles: Vehicle Dynamics, Tire Dynamics, Autonomous Vehicles, Energy Efficiency, In-Wheel Motors, Electric Powertrain Hardware/Software, System Engineering, Root-Cause Analysis.
- Embedded Systems & HW-SW Co-Design: STM32, dsPIC, ESP32, Raspberry Pi with USART, CAN, SPI, I²C protocols.
- Software & Simulation: MATLAB, Simulink, Octave, C/C++, Python, CANoe, Bash, LaTeX.
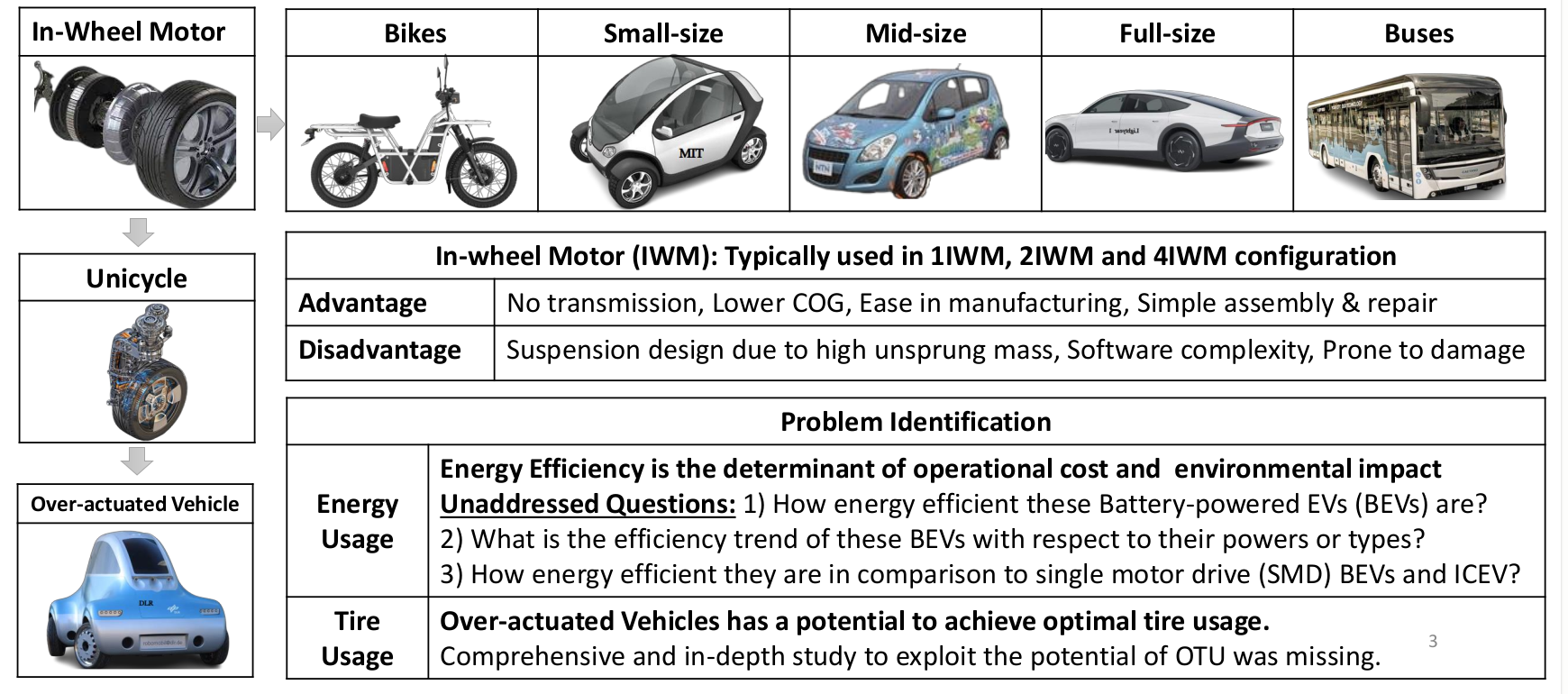
Thesis title: Energy Usage and Tire Usage in Electric Vehicles with In-Wheel Motors.
Abstract: Electric vehicles (EVs) with in-wheel motors (IWMs) are a rapidly emerging technology … This thesis explores EVs with IWMs from two perspectives — energy usage and tire usage.
Towards the energy usage perspective, this thesis considers battery-powered EVs (BEVs) across a wide power interval and groups them into five classes. It concludes that the tank-to-wheel energy efficiency of an IWM BEV may be up to 18% higher than that of a single-motor drive BEV of the same power. In examining how efficient BEVs are with respect to internal combustion engine vehicles, the well-to-wheels efficiencies are ≈33%, 30%, and 18% respectively for natural gas pathway.
Towards the tire usage perspective, the thesis focuses on 4WIS4WID EVs (four-wheel independent steering and drive). It performs block-diagrammatic examinations of existing path-tracking control algorithms to evaluate optimal tire usage (OTU). It finds that motor control systems using disturbance-observer-based control (DOBC) and active disturbance rejection control (ADRC) are sufficient for achieving OTU in simulation.
- A generalized Energy Flow Diagram (EFD) for calculating Tank-to-Wheel energy efficiency for all types of BEVs.
- A control-system-theoretic block diagram of the EFD with derivation of an equation to compute efficiency.
- An extensive literature survey to estimate efficiencies for eight stages of energy flow across five BEV types.
- A graph of TTW energy efficiency versus electric vehicle power and analysis of improvement strategies.
- EFDs for calculating Well-to-Wheel efficiency of IWM BEVs, SMD BEVs, and ICE vehicles (natural gas pathway).
- Examination of Optimal Tire Usage (OTU) in 4WIS4WID EVs and identification of necessary motor control modifications.
- Comparative study of Path-Tracking Control algorithms and discussion on disturbance observer and ADRC schemes.
- Recommendations for improving TTW efficiency and achieving OTU in simulation and practical implementations.
- Ph.D. Fellowship Funded by MHRD, Government of India (2016–2023).
- GATE Scholarship From MHRD, Government of India (2010–2012).
- Dileep Kumar et al. Energy efficiency of battery electric vehicles with in-wheel motors. SAE International Journal of Sustainable Transportation, Energy, Environment, & Policy, 4 (13-04-01-0002), 2022, doi:10.4271/13-04-01-0002.
- Dileep Kumar et al. On Optimal Tire Usage in the Path-Tracking Control of Four-Wheel Independent Steering Four-Wheel Independent Drive Electric Vehicles. SAE International Journal of Connected and Automated Vehicles, 9(2):2026, doi:10.4271/12-09-02-0014.
- Dileep Kumar et al. Control and Simulation of Smart Backup System for Photovoltaic Array in MATLAB/Simulink. IEEE International Conference on Advanced Research in Engineering and Technology (ICARET-2013), doi:03.AETS.2013.2.120.